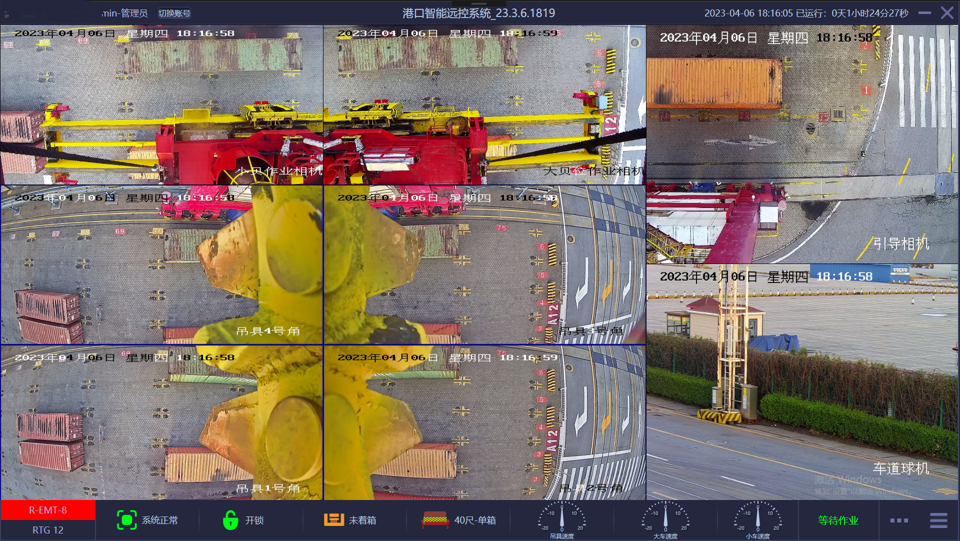
ARTG远程自动化控制主要分三大模块:LCT本地端、RCT操作端。
RCT控制端,操作端通过与LCT建立连接可直接操作所连接的龙门吊,操作模式分手动、半自动、全自动等多种模式。RCT是整个软件的操控命令发起者和操作者。
LCT本地端,龙门吊设备本地端负责最终的动作部分,根据RCT或ECS给出的动作命令或指令信息,自动或手动执行相关动作。设备运作过程中开启自身所有保护和检测功能,并将设备运作状态告知ECS和所连接的RCT。LCT本地端是整个软件的最终执行者。
LCT系统主要参数配置:
1.贝位坐标预设
2.相机预置位设置
3.系统配置(相机配置、数据采集模块信息配置、相机配置、基准值调试配置、层高配置、自动作业参数配置)。
RCT主要参数配置:
1.龙门吊设备IP配置
2.相机信息配置
3.场区定位配置
4.控制台编号配置
5.控制台设备IP配置
6.远控龙门吊编号配置
7.作业场地编号配置
8.系统配置(基础配置、日志配置、视频配置)





 苏公网安备 32059002004393号
苏公网安备 32059002004393号